自动驾驶汽车的概念可以追溯到二十世纪五十年代,人们设想可以坐在车里娱乐,车辆的加速和转向由电子设备自动控制,没有拥堵、没有碰撞、没有疲劳驾驶。
2009年1月17日,Google自动驾驶项目Project Chauffeur正式启动,在一辆丰田Prius(普锐斯)上安装激光雷达、3D相机、GNSS-RTK和惯性导航系统等设备来追踪行人和物体;年底,Google第一代自动驾驶汽车Prius完成100英里(约161km的无人接管自动驾驶任务。
ADAS高级驾驶辅助系统主要分为两部分——软件和硬件
感知硬件上,遍布车身的摄像头负责视觉识别,通过视觉算法进行物体识别、车道线检测和交通标志识别等任务;
超声波雷达负责短距离的障碍物探测,主要功能是低速泊车场景;
毫米波雷达用于中远距离的障碍物探测、速度测量及目标跟踪;

激光雷达发射激光脉冲并接收反射信号,生成三维点云数据,实现精确的距离测量和环境建模;
其它设备还包括高精度定位设备、惯性测量单元(IMU)等,提供车辆的姿态信息,结合卫星导航、基站定位等多源定位技术,实现厘米级的车辆定位服务。
计算与决策
在具备众多感知设备后,汽车获得的数据也呈指数级增长,海量的图片、视频需要强大的车载计算机来处理。
国家工业信息安全发展研究中心副总工程师黄鹏在2021中国汽车论坛“智能网联汽车产业发展与安全分论坛”上公开表示:一辆智能网联汽车每天至少收集10TB的数据。这些数据不仅包含车辆地理位置、车内及车外环境数据、车联网使用数据等,还包括驾乘人员的面部表情、动作、目光、声音数据。
耳熟能详的英伟达OrinX、英特尔的mobileye、华为的MDC810等,都属于智驾计算平台,提供实时数据处理能力和深度学习推理能力,支撑高级驾驶辅助系统(ADAS)和自动驾驶系统(ADS)的决策过程。
执行层面
电驱系统、制动系统、转向系统等,用于执行指令,实现自动化驾驶。
上述层面都是硬件部分,属于基础,想要辅助驾驶能真正辅助人类驾驶员行车,还要依赖软件的支持,也就是算法。而算法也更大程度上决定了ADAS(高级驾驶辅助系统)能力的上限。
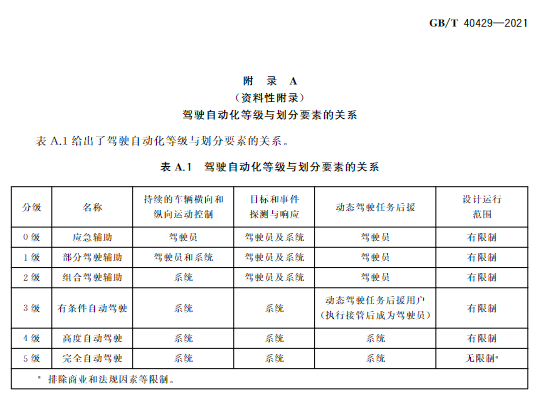
我国于2021年8月发布《汽车驾驶自动化分级》GB/T 40429-2021,2022年3月1日起实施,根据该规定,将汽车驾驶自动化从0级到5级共划分为六个等级,目前已经商用落地的,为2级(部分自动化)及以下等级。
分布式ADAS架构
大概十多年前,部分高档轿车,如奔驰、奥迪、沃尔沃等,搭载的自适应巡航系统、变道提示辅助系统以及自动刹车就属于1级自动化。
和1级自动化相匹配的ADAS系统称为分布式ADAS架构,这种架构和传统燃油车一样,由分布于车内的多个控制器独立运行,各司其职。
如环视摄像头和超声波雷达只服务于泊车功能;Y轴ADAS功能由前毫米波雷达实现,X轴ADAS功能由视觉摄像头实现。在这个框架下,不同功能相互独立,需要通过服务或接口来调用,传感器耦合度很低,是典型的分布式开发,也叫1R1V架构。此架构十分依赖供应商,主机厂在掌控力方面基本没有话语权,属于给什么方案用什么方案,没有太大自主权。
分布式ADAS架构优点缺点都很明显。优点方面,由于功能相对独立,整个系统的集成难度低,可移植性强,开发周期较短,能以较低成本实现较高的收益。
但缺点也很明显,由于过分依赖供应商的方案,主机厂往往只能打包购买供应商的方案,假如想要省点成本自己“DIY”,兼容性可能会受到影响,同时开发费用和研发周期也会大幅增加。最重要的是,此架构下,主机厂依然还是“组装厂”的定位,利润大头都被供应商拿走了,并且ADAS的上限低,用户体验不够好。
域控/跨域式ADAS架构
随着技术的进步,汽车单位时间内产生的数据量大增,需要的芯片算力越来越强,分布式ADAS架构的性能无法满足需求,域控/跨域式ADAS架构就诞生了。

相比分布式ADAS架构,域控式架构增加了域控制器(相当于一个功能全面的CPU),算法上,将传感器端上移到域控制器端,传感器只负责感知,域控制器负责融合算法,提高了功能可用性;整合后,性能的带宽大幅增加,能并行处理多个感知设备的数据,同时控制能力上,也能实现 “一键多用”;此外,主机厂可以根据自己的需求定制功能开发,打破了供应商的封锁。

比较有名的一个案例就是英特尔的mobileye,由于其采用“黑盒方案”,即给什么用什么,主机厂很难开发自己需要的功能,积累的驾驶数据也不能为己所用,虽然很早就搭载于特斯拉、理想、极氪等多个主机厂的车型上,有着先发优势,但由于“黑盒方案”的局限性无法满足主机厂的竞争需求,现在市占率已经远远落后于其他同类企业。
而英伟达则反其道而行,自己仅负责研发硬件,并提供开发平台,需求和功能,乃至算法开发能完全由主机厂自己掌握。除了硬件(算力)上的优势,由于其独特的开放性,目前国内很多厂家都以英伟达作为自己ADAS平台的硬件。
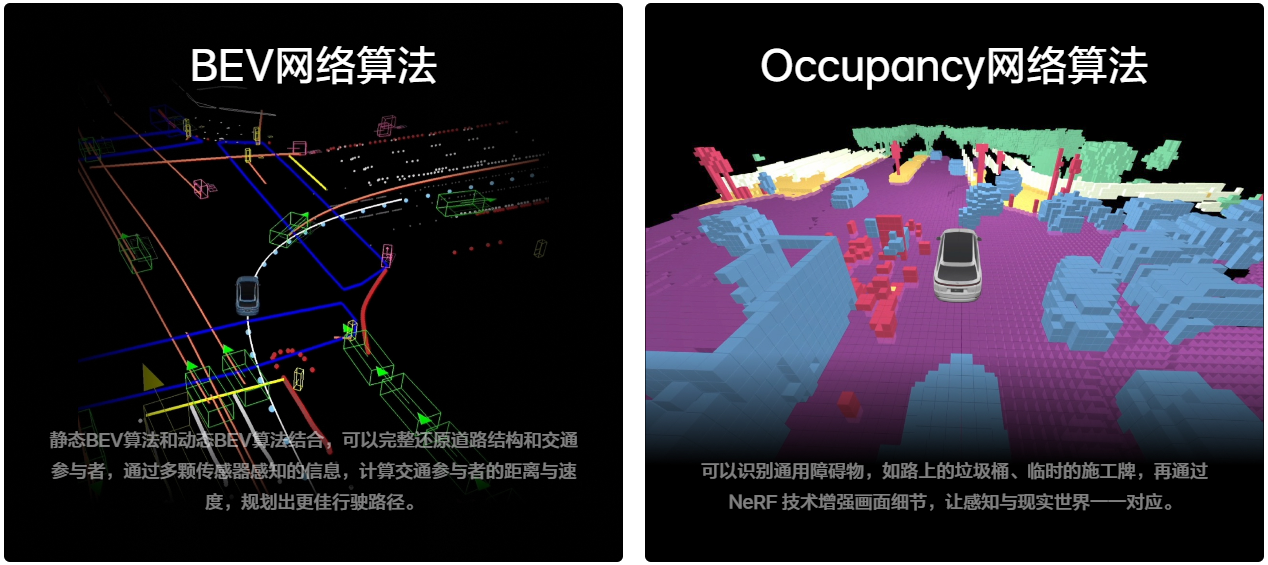
硬件平台的性能上来后,辅助驾驶的上限则由算法来决定,而算法也分三六九等。如此前的模块化算法,到BEV+Transformer,再到现在的端到端(End-to-End),而端到端也可以按照架构分为感知“端到端”、决策规划模型化、模块化端到端和One Model单一模型端到端。在AI和大模型的助力下,智驾算法正从机器驾驶走向拟人驾驶,直至超越人类的驾驶。(朋月)